信息中心
金相显微镜的使用手册
根据观察试样所需的放大倍数要求,正确选配物镜和目镜,分别安装在物镜座上和目镜筒内。调节载物台中心与物镜中心对齐,将制备好的试样放在载物台中心,试样的观察表面应朝下。


金相显微镜的系统组成和特点
金相显微镜系统是将传统的光学显微镜与计算机(数码相机)通过光电转换有机的结合在一起,不仅可以在目镜上作显微观察,还能在计算机(数码相机)显示屏幕上观察实时动态图像,电脑型金相显微镜并能将所需要的图片进行编辑、保存和打印。
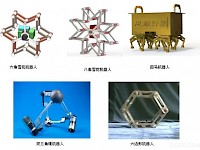
机器人产业新亮点——几何机器人
“几何机器人”在学术领域内被称为“多模式连杆式地面移动系统”,其特点是可以改变内部的身体结构和外部的几何形态,即“变形机器人”或“变形金刚”。为解决以上重大国防安全、航天科研和民生需求,急需探索研制具有超强地形适应能力的特种地面移动系统。
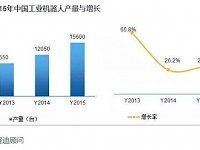
我国工业机器人的三条可走之路
我国工业机器人近年来在某些关键技术上有所突破,但在整体核心技术方面仍处于落后地位,特别是在制造工艺与整套装备方面,缺乏高精密、高速与高效的减速机、伺服电动机、控制器等关键部件,这就导致了工业机器人关键零部件严重依赖进口。


2015年深度报告之“工业4.0”
工业 4.0 是将智能设备、人和数据连接起来组成?虚拟网络-实体物理系统( CPS),并以智能的方式利用这些交换的数据。工业 4.0 的三大主题中,【智能工厂】重点研究智能化生产系统及过程,以及网络化分布式生产设施的实现。

读懂中国制造2025与工业4.0
不久的将来,企业能以CPS(CyberPhysicalSystems,信息物理系统)的形式建立全球网络,整合其机器、仓储系统和生产设施。迈向工业4.0,将是一个渐进的过程。为了适应制造工程的特殊需求,现有的基本技术和经验必须加以改变,还必须探索针对新地点和新市场的创新解决方案。如果成功,工业4.0将提升德国的全球竞争力,并保持其国内制造业继续发展。

工业机器人都涉及哪些高新科技?
机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了激光传感器、视觉传感器和力传感器,并实现了焊缝自动跟踪和自动化生产线上物体的自动定位以及精密装配作业等,大大提高了机器人的作业性能和对环境的适应性。

部署机器视觉系统时必须谨慎的关键点
部署机器视觉系统设置与集成复杂度高,同时后期开发维护也需要考量工站的现场状况加以动态调整,尤其是整个机器视觉系统即便已设置完成,也需要在后期应用持续进行系统优化,或是因应产线产品变更机器视觉系统也需要对应重设,而导入系统若无法弹性对应,势必无法符合使用需求。

机器视觉与计算机视觉的异同点分析
初识机器视觉和计算机视觉这两个名词,感觉是差不多的,都是视觉,而且计算机也是机器,研究计算机视觉不就是研究机器视觉吗?也许很多人都有同样的想法,但通过涉入这一领域会发觉两者虽有许多的相同点,但其实它们是不同的学科。那么什么是机器视觉、计算机视觉,它们之间的区别是什么又有着什么共同之处?