信息中心

机器视觉工业镜头解析
机器视觉虽然发展了这么多年,但很多人认识机器视觉工业镜头或工业相机还是用民用数码相机的概念来直接套用,造成认知误差,甚至导致重要项目或研究因为硬件的选型不到位而失败,走了很多弯路,浪费财力、物力、精力耽搁时间。


工业相机如何参与农作物的检测?
在机器视觉领域,无论是在电子机械、医疗影像、教学科研还是在农业生产等等行业,工业相机的应用可以说已经无孔不入,今天我们仅仅从农作物检测的一个小分支,来看看工业相机是如何发挥它的作用的。
数字图像在医学领域的应用
数字图像在医学领域的应用是从伦琴发现x射线开始的。1895年德国物理学家伦琴在调试一组阴极射线仪器时,发现该仪器可以使远处的胶片感光,而电子在空气中不能传播这么长的距离,因此伦琴断定阴极射线仪器发出了一种还不为人所知的射线,伦琴把这种未知的射线称为“x”射线,并用“X”射线给他妻子的手拍了人类历史上第一张医学图像。
锅炉异种钢焊管的金相分析
由于异种钢含碳量的巨大差异以及合金元素的不同,导致在焊缝处力学性能和金相组织也不同,往往成为爆管的多发地区。焊接方法的采用以及焊接材料的选择直接影响管道的焊接效果和使用性能。
机器人产业新亮点——几何机器人
“几何机器人”在学术领域内被称为“多模式连杆式地面移动系统”,其特点是可以改变内部的身体结构和外部的几何形态,即“变形机器人”或“变形金刚”。为解决以上重大国防安全、航天科研和民生需求,急需探索研制具有超强地形适应能力的特种地面移动系统。
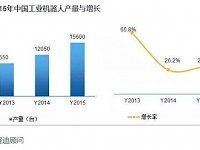
我国工业机器人的三条可走之路
我国工业机器人近年来在某些关键技术上有所突破,但在整体核心技术方面仍处于落后地位,特别是在制造工艺与整套装备方面,缺乏高精密、高速与高效的减速机、伺服电动机、控制器等关键部件,这就导致了工业机器人关键零部件严重依赖进口。


2015年深度报告之“工业4.0”
工业 4.0 是将智能设备、人和数据连接起来组成?虚拟网络-实体物理系统( CPS),并以智能的方式利用这些交换的数据。工业 4.0 的三大主题中,【智能工厂】重点研究智能化生产系统及过程,以及网络化分布式生产设施的实现。

读懂中国制造2025与工业4.0
不久的将来,企业能以CPS(CyberPhysicalSystems,信息物理系统)的形式建立全球网络,整合其机器、仓储系统和生产设施。迈向工业4.0,将是一个渐进的过程。为了适应制造工程的特殊需求,现有的基本技术和经验必须加以改变,还必须探索针对新地点和新市场的创新解决方案。如果成功,工业4.0将提升德国的全球竞争力,并保持其国内制造业继续发展。

工业机器人都涉及哪些高新科技?
机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了激光传感器、视觉传感器和力传感器,并实现了焊缝自动跟踪和自动化生产线上物体的自动定位以及精密装配作业等,大大提高了机器人的作业性能和对环境的适应性。

部署机器视觉系统时必须谨慎的关键点
部署机器视觉系统设置与集成复杂度高,同时后期开发维护也需要考量工站的现场状况加以动态调整,尤其是整个机器视觉系统即便已设置完成,也需要在后期应用持续进行系统优化,或是因应产线产品变更机器视觉系统也需要对应重设,而导入系统若无法弹性对应,势必无法符合使用需求。